3質点の運動エネルギーの和
3質点の運動エネルギーの和
qwer さんの書込 (2009/12/05(Sat) 23:04)
質量m_1,m_2,m_3の3質点の位置ベクトルをr_1,r_2,r_3とし,R,r,sという3つのベクトルを R = (m_1r_1+m_2r_2+m_3r_3)/(m_1+m_2+m_3)
r = r_1 - r_2
s = r_3 - (m_1r_1+m_2r_2)/(m_1+m_2)
とする.このとき,3質点の運動エネルギーの和は,
T = (m_1+m_2+m_3)/2 * R[]^2 + m_1m_2/{2(m_1+m_2)} * r[]^2 + m_3(m_1+m_2)/{2(m_1+m_2+m_3)} * s[]^2
とかける.
(R[],r[],s[]の[]は時間微分せよという意味で使いました.)
換算質量という量に留意し,右辺の3つの項の意味を物理的に解釈せよ.
という問題なのですが,
第1項は,3質点の重心の運動エネルギー 第2項は,質量m_1,m_2の質点を一体(Aとする)とみたときのAの運動エネルギー 第3項は,質量m_1,m_2,m_3の質点を一体(Bとする)とみたときのBの運動エネルギー
を表している.
という答えで,よろしいでしょうか.
Re: 3質点の運動エネルギーの和
Yokkun さんのレス (2009/12/05(Sat) 23:56)
まず,2質点の場合について理解を深められるのがよいと思います.

ここで,
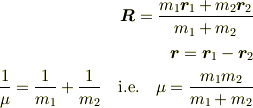
 は重心の位置ベクトル,
は重心の位置ベクトル,  は相対位置ベクトル,
は相対位置ベクトル,  は換算質量です.
は換算質量です.
系の運動エネルギーを書き換えた右辺の第1項は,重心運動のエネルギー(系の並進運動のエネルギー),第2項は相対運動のエネルギーにあたります.
以上を理解されれば,3質点の場合もおのずと明らかではないでしょうか?
Re: 3質点の運動エネルギーの和
qwer さんのレス (2009/12/06(Sun) 00:58)
では, 第1項3質点の重心の運動エネルギー 第2項質量m_2の質点から質量m_1の質点をみたときの,相対運動エネルギー 第3項質量m_1,m_2の重心から質量m_3の質点をみたときの,相対運動エネルギー
をそれぞれ表している,ということでいいですか?
Re: 3質点の運動エネルギーの和
Yokkun さんのレス (2009/12/06(Sun) 01:48)
概ねよいと思います.が,
第2項は,質量m_1,m_2の2質点の相対運動のエネルギー 第3項は,質量m_1,m_2の2質点の重心と質量m_3の質点の相対運動のエネルギー
といっていいでしょう.変位は相対変位になっていますが,換算質量を用いなければならないのですから,〜から見た・・・というのは妥当でない気がします.たとえば第2項は,相互の重心から見た2質点の運動エネルギーになるのです.
Re: 3質点の運動エネルギーの和
qwer さんのレス (2009/12/06(Sun) 02:31)
>たとえば第2項は,相互の重心から見た2質点の運動エネルギーになるのです.
なぜ,重心から見たものになるのでしょうか? rは,質量m_2の質点から質量m_1の質点をみたときの位置ベクトルを表しているんですよね?なぜ,重心が出て来るのでしょうか?
あと,そもそも換算質量とはなんなのでしょうか?単に,こうおけばすっきりするから,便宜上導入しただけのものなのでしょうか?
Re: 3質点の運動エネルギーの和
Yokkun さんのレス (2009/12/06(Sun) 09:16)
簡単な系を考えてみましょう.
質量  の質点が自然長
の質点が自然長  ,ばね定数
,ばね定数  のばねの両端についていて,なめらかな水平面をすべっているとします.それぞれの座標を
のばねの両端についていて,なめらかな水平面をすべっているとします.それぞれの座標を  とすると運動方程式は,
とすると運動方程式は,
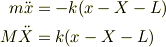
となります.2つの座標が混在した連立微分方程式になっています.両辺を質量で割って辺々引くと,

これが相対座標の運動方程式ですね?この右辺の第2因子の逆数が換算質量になります.なお,重心運動の方程式は,辺々加えて

を得ます.
一方,はじめから重心とともに動く座標系で運動方程式をたててみましょう.
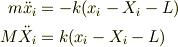
ここで,質量中心系(重心系,慣性中心系,C系などとも呼ぶ)における両者の座標を実験室系のものに書き戻すと,
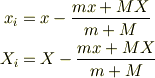
これらを代入すると,2つの運動方程式がいずれも相対運動の方程式になることがわかります.
ですから,相対運動の方程式は質量中心系でみた運動方程式なのです.これを相対変位で表現すると最初につくった形になるわけですが,その副作用が換算質量になったと理解できそうですね.換算質量は,本来何の運動実体(?)も対象としていない仮想上の概念ですから,いわば形式上の便宜といえるでしょう.でも,相対座標を使う限りいつでも換算質量を使えば運動方程式やエネルギー積分を簡単に書けるので,とても便利なものであるといえます.
相対座標の運動方程式は,qwerさんがおっしゃるとおり,「質量m_2の質点から質量m_1の質点をみたときの」運動方程式とみることももちろんできます.先に「〜から見た・・・というのは妥当でない」といった私の表現はちょっと誤解を招く勇み足でした.それがわかるように書き直せば,(  からみた
からみた  の運動方程式)
の運動方程式)

両辺に  を付け加えただけですが,右辺第2項は が加速度運動しているために, には慣性力が働くように見えるということを示しています.これに の運動方程式から
を付け加えただけですが,右辺第2項は が加速度運動しているために, には慣性力が働くように見えるということを示しています.これに の運動方程式から  を代入してやれば,同じ結果を得ます.
を代入してやれば,同じ結果を得ます.